












動画

ロボット開発企業のボストン・ダイナミクスが、長らく研究を続けている二足歩行ロボット「Atlas」の新たなムービーを公開しました。今回は2台の「Atlas」が互い違いに設置された角度のついた板をうまく足場にしてジャンプし走り抜けたり、息を合わせて後方宙返りを決めたりしています。
Atlas | Partners in Parkour – YouTube
[embedded content]
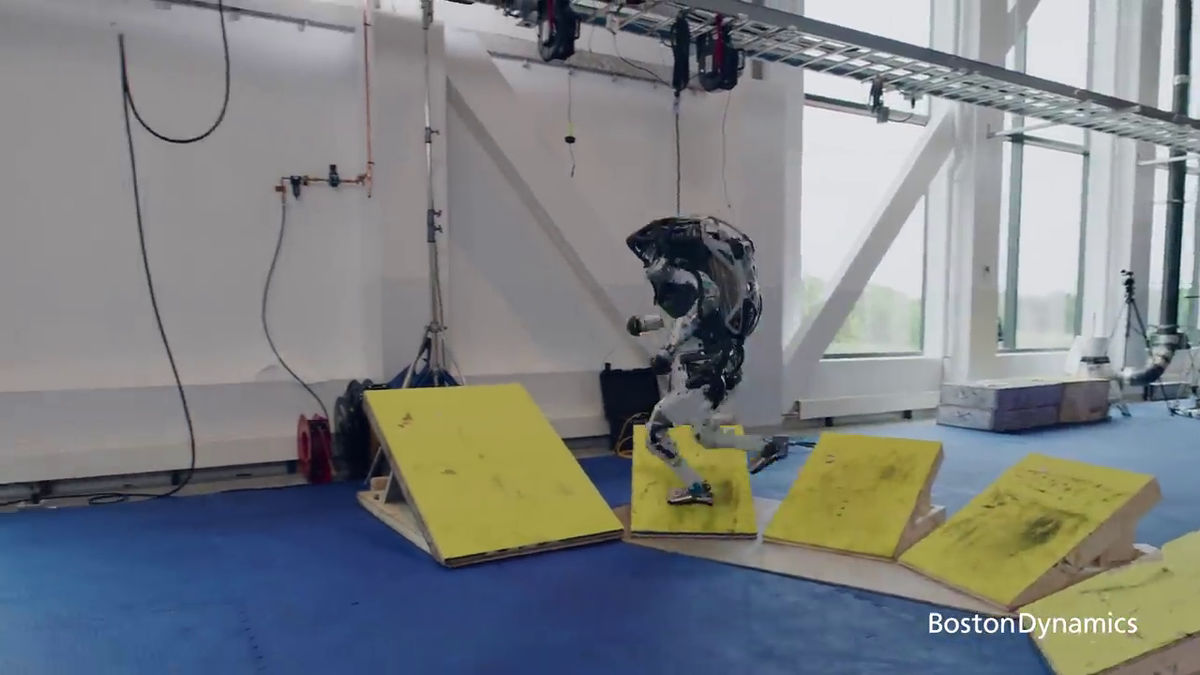
「SASUKE」の冒頭に出てくる「クワッドステップス」のような、角度をつけて設置された足場を飛び移っていくAtlas。

離れた足場へ高くジャンプ。

カーブに角度をつけて設置された足場も勢いよく走り抜けていきます。

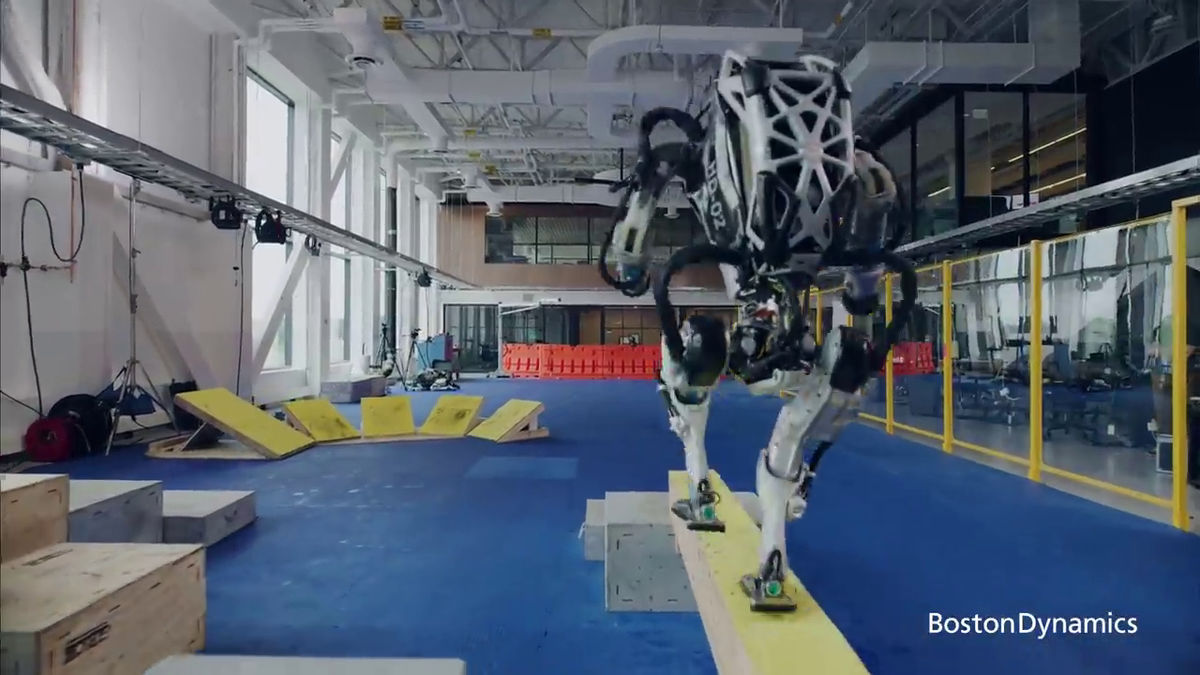
今度は細い足場もありますが、難なく着地。

1台目のAtlasが足場を飛び越していくと、細い足場を平均台のように2台目のAtlasが渡り始めました。
1台目のAtlasが走ってきた足場を反対向きに進む2台目のAtlas。
再び1台目のAtlasが姿を見せ、細い足場に手をつき体と足を横にして飛び越えます。

同じ足場の上にやってきた2台のAtlasが息を合わせて……
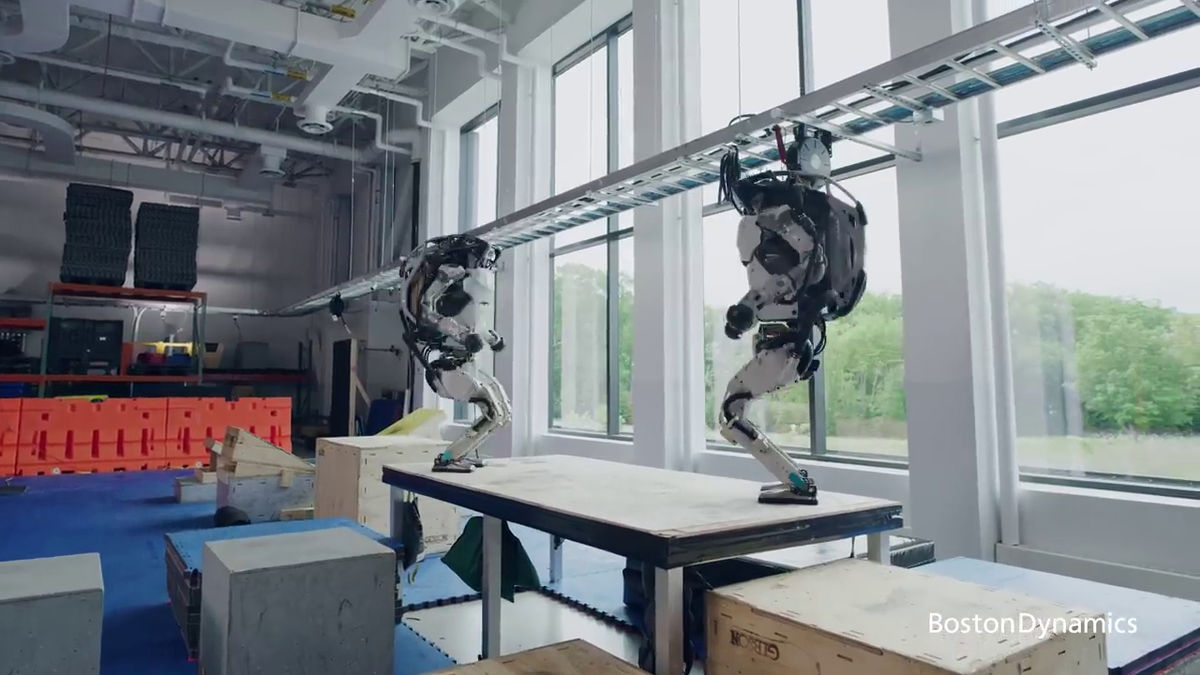
後方宙返り。

着地して、さらにもう1度後方宙返り。

見事に着地。奥のAtlasはまるで肩を払うようなしぐさを見せ、手前のAtlasは両手を突き上げて素直に喜んでいるかのようです。

これらの動きをどう実現していったかを追う映像も公開されています。
Inside the lab: How does Atlas work? – YouTube
[embedded content]
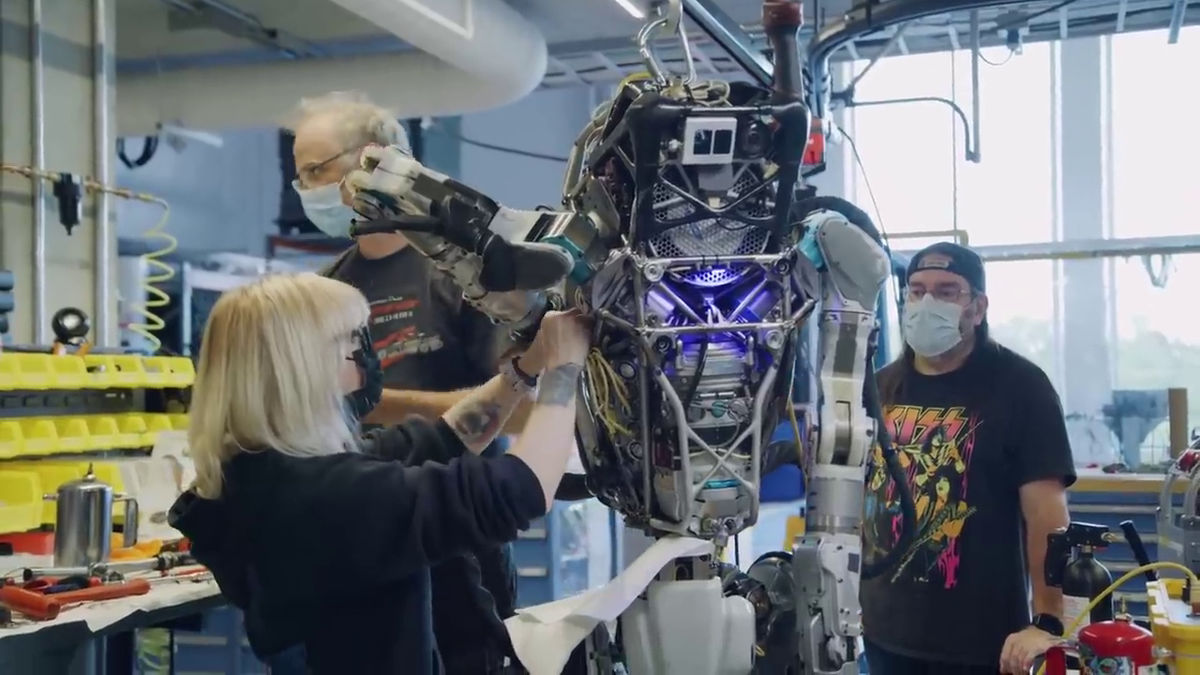
開発を行う技術者たち。
コースを実際に人間が試走しています。

Atlasも最初からうまく走れたわけではなく、いろいろなミスを重ね、調整しつつたどりついたものであることがよくわかります。



なお、公式ブログによれば、カットの声がかかった瞬間、技術者たちはAtlasに駆け寄って次のテイクのためにすぐに変更を加えていたとのこと。最終的な映像でも見ている人は気づかないかもしれない微妙なミスがあって、さらなる改善を行うつもりだそうです。
Atlas | Leaps, Bounds, and Backflips
https://blog.bostondynamics.com/atlas-leaps-bounds-and-backflips
この記事のタイトルとURLをコピーする

